–љ–∞—Г—З–љ—Л–є
–ґ—Г—А–љ–∞–ї
–°—А–Њ—З–љ–∞—П –њ—Г–±–ї–Є–Ї–∞—Ж–Є—П –љ–∞—Г—З–љ–Њ–є —Б—В–∞—В—М–Є
+7 995 770 98 40
+7 995 202 54 42
info@journalpro.ru

–Я—А–Њ–Љ—Л—И–ї–µ–љ–љ—Л–µ —А–Њ–±–Њ—В—Л –≤ –Љ–∞—И–Є–љ–Њ—Б—В—А–Њ–µ–љ–Є–Є

–†—Г–±—А–Є–Ї–∞: –Ґ–µ—Е–љ–Є—З–µ—Б–Ї–Є–µ –љ–∞—Г–Ї–Є
–Ц—Г—А–љ–∞–ї: «–Х–≤—А–∞–Ј–Є–є—Б–Ї–Є–є –Э–∞—Г—З–љ—Л–є –Ц—Г—А–љ–∞–ї вДЦ7 2019» (–Є—О–ї—М, 2019)
–Ъ–Њ–ї–Є—З–µ—Б—В–≤–Њ –њ—А–Њ—Б–Љ–Њ—В—А–Њ–≤ —Б—В–∞—В—М–Є: 3032
–Я–Њ–Ї–∞–Ј–∞—В—М PDF –≤–µ—А—Б–Є—О –Я—А–Њ–Љ—Л—И–ї–µ–љ–љ—Л–µ —А–Њ–±–Њ—В—Л –≤ –Љ–∞—И–Є–љ–Њ—Б—В—А–Њ–µ–љ–Є–Є
–°–µ–≤–Њ—Б—В—М—П–љ–Њ–≤ –Р–ї–µ–Ї—Б–∞–љ–і—А –Ъ–Њ–љ—Б—В–∞–љ—В–Є–љ–Њ–≤–Є—З
–Љ–∞–≥–Є—Б—В—А–∞–љ—В
–Ї–∞—Д–µ–і—А–∞ —В–µ—Е–љ–Њ–ї–Њ–≥–Є–Є –Љ–∞—И–Є–љ–Њ—Б—В—А–Њ–µ–љ–Є—П,
–Т–Є—В–Ї–Њ–≤—Б–Ї–∞—П –Р–љ–∞—Б—В–∞—Б–Є—П –Р–ї–µ–Ї—Б–µ–µ–≤–љ–∞
–Љ–∞–≥–Є—Б—В—А–∞–љ—В,
–Ї–∞—Д–µ–і—А–∞ —В–µ—Е–љ–Њ–ї–Њ–≥–Є–Є –Љ–∞—И–Є–љ–Њ—Б—В—А–Њ–µ–љ–Є—П,
–Т–Њ—А–Њ–љ–µ–ґ—Б–Ї–Є–є –≥–Њ—Б—Г–і–∞—А—Б—В–≤–µ–љ–љ—Л–є —В–µ—Е–љ–Є—З–µ—Б–Ї–Є–є —Г–љ–Є–≤–µ—А—Б–Є—В–µ—В, –≥. –Т–Њ—А–Њ–љ–µ–ґ
–Р–љ–љ–Њ—В–∞—Ж–Є—П: –Т —Г—Б–ї–Њ–≤–Є—П—Е —Г—Б–Ї–Њ—А–µ–љ–љ–Њ–≥–Њ –љ–∞—Г—З–љ–Њ-—В–µ—Е–љ–Є—З–µ—Б–Ї–Њ–≥–Њ –њ—А–Њ–≥—А–µ—Б—Б–∞, –Ї–Њ–≥–і–∞ –њ—А–Њ–Є—Б—Е–Њ–і–Є—В —З–∞—Б—В–∞—П —Б–Љ–µ–љ–∞ –Њ–±—К–µ–Ї—В–Њ–≤ –њ—А–Њ–Є–Ј–≤–Њ–і—Б—В–≤–∞ –Є –њ–Њ–≤—Л—И–∞—О—В—Б—П —В—А–µ–±–Њ–≤–∞–љ–Є—П –Ї –Ї–∞—З–µ—Б—В–≤—Г –њ—А–Њ–і—Г–Ї—Ж–Є–Є, —В–µ—Е–љ–Њ–ї–Њ–≥–Є—З–µ—Б–Ї–Є–µ —Б–Є—Б—В–µ–Љ—Л –і–Њ–ї–ґ–љ—Л –±—Л—В—М –±—Л—Б—В—А–Њ–њ–µ—А–µ–љ–∞–ї–∞–ґ–Є–≤–∞–µ–Љ—Л–Љ–Є –љ–∞ –≤—Л–њ—Г—Б–Ї –љ–Њ–≤–Њ–є –њ—А–Њ–і—Г–Ї—Ж–Є–Є –њ–Њ –±–Њ–ї–µ–µ –њ—А–Њ–≥—А–µ—Б—Б–Є–≤–љ–Њ–є —В–µ—Е–љ–Њ–ї–Њ–≥–Є–Є. –Т —Н—В–Є—Е —Г—Б–ї–Њ–≤–Є—П—Е –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ –њ—А–Њ–Љ—Л—И–ї–µ–љ–љ—Л—Е —А–Њ–±–Њ—В–Њ–≤ –љ–∞ –Њ—Б–љ–Њ–≤–љ—Л—Е —В–µ—Е–љ–Њ–ї–Њ–≥–Є—З–µ—Б–Ї–Є—Е –Њ–њ–µ—А–∞—Ж–Є—П—Е, –љ–∞ –≤—Б–њ–Њ–Љ–Њ–≥–∞—В–µ–ї—М–љ—Л—Е –Є —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л—Е —А–∞–±–Њ—В–∞—Е –њ–Њ–Ј–≤–Њ–ї—П–µ—В —Б–Њ–Ј–і–∞–≤–∞—В—М –Љ–љ–Њ–≥–Њ—Д—Г–љ–Ї—Ж–Є–Њ–љ–∞–ї—М–љ—Л–µ, –ї–µ–≥–Ї–Њ –њ–µ—А–µ–љ–∞–ї–∞–ґ–Є–≤–∞–µ–Љ—Л–µ —В–µ—Е–љ–Њ–ї–Њ–≥–Є—З–µ—Б–Ї–Є–µ —Б–Є—Б—В–µ–Љ—Л. –Ґ–∞–Ї–Є–µ —Б–Є—Б—В–µ–Љ—Л –Њ–±—А–∞–Ј—Г—О—В –њ—А–Є–љ—Ж–Є–њ–Є–∞–ї—М–љ–Њ –љ–Њ–≤—Л–µ —В–µ—Е–љ–Є—З–µ—Б–Ї–Є–µ —Б—А–µ–і—Б—В–≤–∞, —Б–њ–Њ—Б–Њ–±–љ—Л–µ –Њ–њ–µ—А–∞—В–Є–≤–љ–Њ —А–µ–∞–≥–Є—А–Њ–≤–∞—В—М –њ—А–Є –Є–Ј–Љ–µ–љ–µ–љ–Є–Є –Њ–±—К–µ–Ї—В–Њ–≤ –њ—А–Њ–Є–Ј–≤–Њ–і—Б—В–≤–∞. [1] –Т —Б—В–∞—В—М–µ —А–∞—Б—Б–Љ–∞—В—А–Є–≤–∞—О—В—Б—П –њ—А–µ–Є–Љ—Г—Й–µ—Б—В–≤–∞ –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є—П —А–Њ–±–Њ—В–Њ–≤-–Љ–∞–љ–Є–њ—Г–ї—П—В–Њ—А–Њ–≤ –љ–∞ –Љ–∞—И–Є–љ–Њ—Б—В—А–Њ–Є—В–µ–ї—М–љ—Л—Е –њ—А–µ–і–њ—А–Є—П—В–Є—П—Е.
–Ъ–ї—О—З–µ–≤—Л–µ —Б–ї–Њ–≤–∞: –њ—А–Њ–Љ—Л—И–ї–µ–љ–љ—Л–є —А–Њ–±–Њ—В, –Љ–∞—И–Є–љ–Њ—Б—В—А–Њ–µ–љ–Є–µ, —А–Њ–±–Њ—В-–Љ–∞–љ–Є–њ—Г–ї—П—В–Њ—А, —Б–≤–∞—А–Ї–∞, —Б—В–∞–љ–Њ–Ї —Б –І–Я–£, —И–µ—Б—В—М —Б—В–µ–њ–µ–љ–µ–є —Б–≤–Њ–±–Њ–і—Л, FANUC, R-1000iA/80F, —В–Њ—З–љ–Њ—Б—В—М, –±—Л—Б—В—А–Њ–і–µ–є—Б—В–≤–Є–µ.
INDUSTRIAL ROBOTS IN MECHANICAL ENGINEERING
Sevostyanov A.K.1, Vitkovskaya A.A.2
1Sevostyanov Alexander Konstantinovich -undergraduate, department
technologies of mechanical engineering,
2Vitkovskaya Anastasia Alekseevna- undergraduate, department
technologies of mechanical engineering,
VORONEZH STATE TECHNICAL UNIVERSITY, Voronezh
Abstract: In the conditions of the accelerated scientific and technical progress when there is a frequent change of objects of production and requirements to quality of products raise, technological systems have to be fast-readjusted on release of new products on more progressive technology. In these conditions use of industrial robots on the main technological operations, at auxiliary and transport works allows to create the multipurpose, easily readjusted technological systems. Such systems form essentially new technical means capable to react quickly at change of objects of production. In article advantages of use of robots manipulators at machine-building enterprises are considered.
Keywords: industrial robot, robotic arm, welding, CNC machine, six degrees of freedom, FANUC, R-1000iA/80F, precision, performance.
–£–Ф–Ъ 681.5
–Я–Њ–љ—П—В–Є–µ –Њ –њ—А–Њ–Љ—Л—И–ї–µ–љ–љ—Л—Е —А–Њ–±–Њ—В–∞—Е –Є –Є—Е –Ї–ї–∞—Б—Б–Є—Д–Є–Ї–∞—Ж–Є—П
–Я—А–Њ–Љ—Л—И–ї–µ–љ–љ—Л–µ —А–Њ–±–Њ—В—Л –Ј–∞–Љ–µ–љ—П—О—В —З–µ–ї–Њ–≤–µ–Ї–∞ –љ–∞ —В—П–ґ–µ–ї—Л—Е, –Љ–Њ–љ–Њ—В–Њ–љ–љ—Л—Е, –Њ–њ–∞—Б–љ—Л—Е –Є –≤—А–µ–і–љ—Л—Е –і–ї—П –Ј–і–Њ—А–Њ–≤—М—П —А–∞–±–Њ—В–∞—Е. –†–Њ–±–Њ—В—Л –Є—Б–њ–Њ–ї—М–Ј—Г—О—В—Б—П –і–ї—П –∞–≤—В–Њ–Љ–∞—В–Є–Ј–∞—Ж–Є–Є —А–∞–Ј–ї–Є—З–љ—Л—Е —В–µ—Е–љ–Њ–ї–Њ–≥–Є—З–µ—Б–Ї–Є—Е, —В—А–∞–љ—Б–њ–Њ—А—В–љ—Л—Е –Є –њ–Њ–≥—А—Г–Ј–Њ—З–љ–Њ-—А–∞–Ј–≥—А—Г–Ј–Њ—З–љ—Л—Е –Њ–њ–µ—А–∞—Ж–Є–є. [2]
–Я—А–Њ–Љ—Л—И–ї–µ–љ–љ—Л–µ —А–Њ–±–Њ—В—Л –Ї–ї–∞—Б¬≠—Б–Є—Д–Є—Ж–Є—А—Г—О—В—Б—П –њ–Њ –љ–∞–Ј–љ–∞—З–µ–љ–Є—О, —Б–њ–Њ¬≠—Б–Њ–±—Г —Г–њ—А–∞–≤–ї–µ–љ–Є—П, –Ї–Њ–љ—Б—В—А—Г–Ї—В–Є–≤–љ—Л–Љ –њ–∞—А–∞–Љ–µ—В—А–∞–Љ, –њ–Њ —В–Њ—З–љ–Њ—Б—В–Є –і–≤–Є–ґ–µ–љ–Є—П, –њ–Њ –±—Л—Б—В—А–Њ–і–µ–є—Б—В–≤–Є—О.
–Т –Ј–∞–≤–Є—Б–Є–Љ–Њ—Б—В–Є –Њ—В —Е–∞—А–∞–Ї—В–µ—А–∞ –≤—Л–њ–Њ–ї–љ—П–µ–Љ—Л—Е —Д—Г–љ–Ї—Ж–Є–є –њ—А–Є —А–µ–∞¬≠–ї–Є–Ј–∞—Ж–Є–Є —В–µ—Е–љ–Њ–ї–Њ–≥–Є—З–µ—Б–Ї–Њ–≥–Њ –њ—А–Њ—Ж–µ—Б—Б–∞ —А–Њ–±–Њ—В—Л –і–µ¬≠–ї—П—В—Б—П –љ–∞ –Њ—Б–љ–Њ–≤–љ—Л–µ –Є –≤—Б–њ–Њ–Љ–Њ–≥–∞—В–µ–ї—М–љ—Л–µ. –Ъ –Њ—Б–љ–Њ–≤–љ—Л–Љ –Љ–Њ–ґ–љ–Њ –Њ—В–љ–µ—Б—В–Є —А–Њ–±–Њ—В—Л вАФ –Љ–∞–љ–Є–њ—Г–ї—П—В–Њ—А—Л, –Ї–Њ—В–Њ—А—Л–µ –≤—Л–њ–Њ–ї–љ—П—О—В —В–∞–Ї–Є–µ –Њ–њ–µ—А–∞—Ж–Є–Є –Ї–∞–Ї —Б–≤–∞—А–Ї–∞, –њ–∞–є–Ї–∞, —Б–±–Њ—А–Ї–∞. –Э–∞ —А–Є—Б—Г–љ–Ї–µ 1 –њ–Њ–Ї–∞–Ј–∞–љ —А–Њ–±–Њ—ВвАФ–Љ–∞–љ–Є–њ—Г–ї—П—В–Њ—А, –≤—Л–њ–Њ–ї–љ—П—О—Й–Є–є –Њ–њ–µ—А–∞—Ж–Є—О —Б–≤–∞—А–Ї–Є.
–†–Є—Б—Г–љ–Њ–Ї 1 вАФ –†–Њ–±–Њ—В –Љ–∞–љ–Є–њ—Г–ї—П—В–Њ—А –≤—Л–њ–Њ–ї–љ—П–µ—В –Њ–њ–µ—А–∞—Ж–Є—О вАЬ–°–≤–∞—А–Ї–∞вАЭ
–Ъ –≤—Б–њ–Њ–Љ–Њ–≥–∞—В–µ–ї—М–љ—Л–Љ вАФ —Г—Б—В–∞–љ–Њ–≤–Ї–∞ –Ј–∞–≥–Њ—В–Њ–≤–Ї–Є –≤ –њ—А–Є—Б–њ–Њ—Б–Њ–±–ї–µ–љ–Є–µ, —Б—В–∞–љ–Њ–Ї; —Г–Ї–ї–∞–і–Ї–∞ –і–µ—В–∞–ї–Є –Є–ї–Є –Ј–∞–≥–Њ—В–Њ–≤–Ї–Є –љ–∞ –Ї–Њ–љ–≤–µ–є–µ—А; —Г–і–∞–ї–µ–љ–Є–µ –Њ—В—Е–Њ–і–Њ–≤ (—Б—В—А—Г–ґ–Ї–Є –Є –і—А.), –Ї–Њ–љ—В—А–Њ–ї—М —А–∞–Ј–Љ–µ—А–Њ–≤. –Э–∞ —А–Є—Б—Г–љ–Ї–µ 2 –њ–Њ–Ї–∞–Ј–∞–љ —А–Њ–±–Њ—В-–Љ–∞–љ–Є–њ—Г–ї—П—В–Њ—А, —Г—Б—В–∞–љ–∞–≤–ї–Є–≤–∞—О—Й–Є–є –Ј–∞–≥–Њ—В–Њ–≤–Ї—Г –≤ —В–Њ–Ї–∞—А–љ—Л–є —Б—В–∞–љ–Њ–Ї —Б –І–Я–£.

–†–Є—Б—Г–љ–Њ–Ї 2 вАФ –†–Њ–±–Њ—В –Љ–∞–љ–Є–њ—Г–ї—П—В–Њ—А —Г—Б—В–∞–љ–∞–≤–ї–Є–≤–∞–µ—В –Ј–∞–≥–Њ—В–Њ–≤–Ї—Г –≤ —Б—В–∞–љ–Њ–Ї
–Я—А–Є–љ—Ж–Є–њ –і–µ–є—Б—В–≤–Є—П —А–Њ–±–Њ—В–∞-–Љ–∞–љ–Є–њ—Г–ї—П—В–Њ—А–∞ –Є —Г–њ—А–∞–≤–ї–µ–љ–Є–µ –Є–Љ.
–Я—А–Њ–Љ—Л—И–ї–µ–љ–љ—Л–µ —А–Њ–±–Њ—В—Л-–Љ–∞–љ–Є–њ—Г–ї—П—В–Њ—А—Л –Є–Љ–µ—О—В —И–µ—Б—В—М —Б—Г—Б—В–∞–≤–Њ–≤, –≤–љ–µ—И–љ–µ –Њ–љ–Є –љ–∞–њ–Њ–Љ–Є–љ–∞—О—В —З–µ–ї–Њ–≤–µ—З–µ—Б–Ї—Г—О —А—Г–Ї—Г (–њ–ї–µ—З–Њ). –Я–ї–µ—З–Њ –Љ–Њ–љ—В–Є—А—Г–µ—В—Б—П –љ–∞ –љ–µ–њ–Њ–і–≤–Є–ґ–љ–Њ–є –Њ—Б–љ–Њ–≤–µ, —Б–ї–µ–і–Њ–≤–∞—В–µ–ї—М–љ–Њ —В–∞–Ї–Њ–є —А–Њ–±–Њ—В –Є–Љ–µ–µ—В —И–µ—Б—В—М —Б—В–µ–њ–µ–љ–µ–є —Б–≤–Њ–±–Њ–і—Л, –∞ —Н—В–Њ –Ј–љ–∞—З–Є—В, —З—В–Њ –Љ–∞–љ–Є–њ—Г–ї—П—В–Њ—А –Љ–Њ–ґ–µ—В –і–≤–Є–≥–∞—В—М—Б—П –њ–Њ —И–µ—Б—В–Є —А–∞–Ј–ї–Є—З–љ—Л–Љ –љ–∞–њ—А–∞–≤–ї–µ–љ–Є—П–Љ.
–Э–∞ —А–Є—Б—Г–љ–Ї–µ 3 –њ–Њ–Ї–∞–Ј–∞–љ—Л –Њ—Б–Є —А–Њ–±–Њ—В–∞-–Љ–∞–љ–Є–њ—Г–ї—П—В–Њ—А–∞.
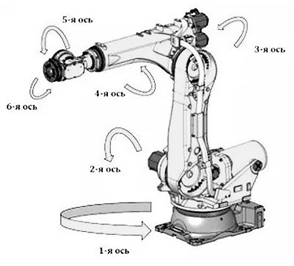
–†–Є—Б—Г–љ–Њ–Ї 3 вАФ –®–µ—Б—В—М —Б—В–µ–њ–µ–љ–µ–є —Б–≤–Њ–±–Њ–і—Л —А–Њ–±–Њ—В–∞-–Љ–∞–љ–Є–њ—Г–ї—П—В–Њ—А–∞
–†–Њ–±–Њ—В—Л –Њ—Б–љ–∞—Й–µ–љ—Л –Ї—А–µ–њ–ї–µ–љ–Є–µ–Љ, –≤ –Ї–Њ—В–Њ—А–Њ–µ –Љ–Њ–ґ–µ—В —Г—Б—В–∞–љ–∞–≤–ї–Є–≤–∞—В—М—Б—П —А–∞–Ј–ї–Є—З–љ—Л–µ —Г—Б—В—А–Њ–є—Б—В–≤–∞ –і–ї—П –Ј–∞—Е–≤–∞—В–∞ –Ј–∞–≥–Њ—В–Њ–≤–Ї–Є, –і–µ—В–∞–ї–Є, –њ–Њ–ї—Г—Д–∞–±—А–Є–Ї–∞—В–∞. –Ю–љ–Њ –љ–∞–њ–Њ–Љ–Є–љ–∞–µ—В —З–µ–ї–Њ–≤–µ—З–µ—Б–Ї—Г—О —А—Г–Ї—Г (–Ї–Є—Б—В—М), –Ї–Њ—В–Њ—А–∞—П –њ–Њ–Ј–≤–Њ–ї—П–µ—В —А–Њ–±–Њ—В—Г вАЬ—Е–≤–∞—В–∞—В—МвАЭ –Є –њ–µ—А–µ–Љ–µ—Й–∞—В—М —В—А–µ–±—Г–µ–Љ—Л–є –њ—А–µ–і–Љ–µ—В, —Г—Б—В–∞–љ–∞–≤–ї–Є–≤–∞—В—М –Є—Е –≤ —Б—В–∞–љ–Њ–Ї, —Б–љ–Є–Љ–∞—В—М –њ–Њ—Б–ї–µ –Њ–±—А–∞–±–Њ—В–Ї–Є, –Љ–µ–љ—П—В—М —А–µ–ґ—Г—Й–Є–є –Є–љ—Б—В—А—Г–Љ–µ–љ—В, —Б–Ї–ї–∞–і—Л–≤–∞—В—М –і–µ—В–∞–ї–Є –Є –Ј–∞–≥–Њ—В–Њ–≤–Ї–Є –≤ —В–∞—А—Г –і–ї—П —Е—А–∞–љ–µ–љ–Є—П –Є —В–∞–Ї –і–∞–ї–µ–µ. –Ю—З–µ–љ—М —З–∞—Б—В–Њ –Љ–∞–љ–Є–њ—Г–ї—П—В–Њ—А—Л –Є–Љ–µ—О—В –≤—Б—В—А–Њ–µ–љ–љ—Л–µ –і–∞—В—З–Є–Ї–Є –і–∞–≤–ї–µ–љ–Є—П, –Ї–Њ—В–Њ—А—Л–µ –Љ–Њ–≥—Г—В –Ї–Њ–љ—В—А–Њ–ї–Є—А–Њ–≤–∞—В—М —Б–Є–ї—Г –Ј–∞—Е–≤–∞—В–∞. –£–њ—А–∞–≤–ї—П—В—М —А–Њ–±–Њ—В–Њ–Љ –Љ–Њ–ґ–љ–Њ —Б –њ–Њ–Љ–Њ—Й—М—О –њ—А–Њ–≥—А–∞–Љ–Љ—Л, –∞–і–∞–њ—В–Є–≤–љ–Њ–≥–Њ —Г–њ—А–∞–≤–ї–µ–љ–Є—П (—Б–µ–љ—Б–Њ—А–љ—Л–µ —Г—Б—В—А–Њ–є—Б—В–≤–∞), —Г–њ—А–∞–≤–ї–µ–љ–Є–µ –ї—О–і—М–Љ–Є –љ–∞ —А–∞—Б—Б—В–Њ—П–љ–Є–Є –Є —Б –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ–Љ –Є—Б–Ї—Г—Б—Б—В–≤–µ–љ–љ–Њ–≥–Њ –Є–љ—В–µ–ї–ї–µ–Ї—В–∞.
–Ъ–Њ–Љ–њ–Њ–љ–µ–љ—В—Л –њ—А–Њ–Љ—Л—И–ї–µ–љ–љ–Њ–≥–Њ —А–Њ–±–Њ—В–∞-–Љ–∞–љ–Є–њ—Г–ї—П—В–Њ—А–∞.
–†–Њ–±–Њ—В—Л-–Љ–∞–љ–Є–њ—Г–ї—П—В–Њ—А—Л –Ї–ї–∞—Б—Б–Є—Д–Є—Ж–Є—А—Г—О—В—Б—П –њ–Њ –≥—А—Г–Ј–Њ–њ–Њ–і—К–µ–Љ–љ–Њ—Б—В–Є, –њ–Њ –і–Њ—Б—П–≥–∞–µ–Љ–Њ—Б—В–Є, –њ–Њ –Ї–Њ–ї–Є—З–µ—Б—В–≤—Г –Њ—Б–µ–є –≤—А–∞—Й–µ–љ–Є—П, –њ–Њ —А–∞–±–Њ—В–µ –≤ –Њ–њ–∞—Б–љ—Л—Е –Є –∞–≥—А–µ—Б—Б–Є–≤–љ—Л—Е —Б—А–µ–і–∞—Е, –њ–Њ –њ—А–Є–≤–Њ–і—Г —А—Г–Ї–Є –Є –њ—А–Є–≤–Њ–і—Г —Б–∞–Љ–Њ–≥–Њ —А–Њ–±–Њ—В–∞ –Є —В–∞–Ї –і–∞–ї–µ–µ. –Э–∞ —А–Є—Б—Г–љ–Ї–µ 4 –њ–Њ–Ї–∞–Ј–∞–љ —А–Њ–±–Њ—В-–Љ–∞–љ–Є–њ—Г–ї—П—В–Њ—А —П–њ–Њ–љ—Б–Ї–Њ–є —Д–Є—А–Љ—Л FANUC, –Љ–Њ–і–µ–ї–Є R-1000iA/80F. [3]
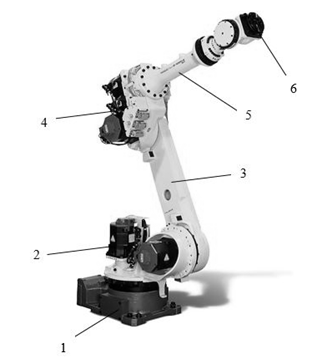
–†–Є—Б—Г–љ–Њ–Ї 4 вАФ –†–Њ–±–Њ—В –Љ–∞–љ–Є–њ—Г–ї—П—В–Њ—А —П–њ–Њ–љ—Б–Ї–Њ–є —Д–Є—А–Љ—Л FANUC R-1000iA/80F:
–Ф–∞–љ–љ—Л–є —А–Њ–±–Њ—ВвАФ–Љ–∞–љ–Є–њ—Г–ї—П—В–Њ—А –њ–Њ–і–∞–µ—В –Ј–∞–≥–Њ—В–Њ–≤–Ї—Г –≤ —Б—В–∞–љ–Њ–Ї, –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В —Б–Љ–µ–љ—Г –Љ–µ—В–∞–ї–ї–Њ—А–µ–ґ—Г—Й–µ–≥–Њ –Є–љ—Б—В—А—Г–Љ–µ–љ—В–∞, –њ—А–Є–љ–Є–Љ–∞–µ—В –Є –Ї–ї–∞–і–µ—В –Њ–±—А–∞—В–љ–Њ –љ–∞ –Ї–Њ–љ–≤–µ–є–µ—А –і–ї—П –њ–Њ—Б–ї–µ–і—Г—О—Й–µ–є –Њ–±—А–∞–±–Њ—В–Ї–Є –љ–∞ –і—А—Г–≥–Є—Е —Б—В–∞–љ–Ї–∞—Е.
–С–ї–∞–≥–Њ–і–∞—А—П —В–Њ–Љ—Г, —З—В–Њ –≤ —А–∞–±–Њ—З–Є–є –Њ—А–≥–∞–љ –Љ–Њ–ґ–µ—В –≤—Б—В–∞–≤–ї—П—В—М—Б—П –љ–µ —В–Њ–ї—М–Ї–Њ —Г—Б—В—А–Њ–є—Б—В–≤–Њ –і–ї—П –Ј–∞—Е–≤–∞—В–∞ –Ј–∞–≥–Њ—В–Њ–≤–Њ–Ї –Є –Є–љ—Б—В—А—Г–Љ–µ–љ—В–Њ–≤, –∞ —В–∞–Ї–ґ–µ —Г—Б—В—А–Њ–є—Б—В–≤–Њ –і–ї—П —Б–≤–∞—А–Ї–Є, –і–µ–ї–∞–µ—В –і–∞–љ–љ—Л–є –Љ–∞–љ–Є–њ—Г–ї—П—В–Њ—А —Д—Г–љ–Ї—Ж–Є–Њ–љ–∞–ї—М–љ—Л–Љ.
–Я—А–µ–Є–Љ—Г—Й–µ—Б—В–≤–∞ –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є—П —А–Њ–±–Њ—В–Њ–≤-–Љ–∞–љ–Є–њ—Г–ї—П—В–Њ—А–Њ–≤.
–У–ї–∞–≤–љ—Л–Љ–Є –њ–Њ–Ї–∞–Ј–∞—В–µ–ї—П–Љ–Є —А–∞–±–Њ—В—Л —А–Њ–±–Њ—В–Њ–≤ —П–≤–ї—П—О—В—Б—П —В–Њ—З–љ–Њ—Б—В—М –Є –±—Л—Б—В—А–Њ–і–µ–є—Б—В–≤–Є–µ. –Ф–∞–љ–љ—Л–µ –њ–∞—А–∞–Љ–µ—В—А—Л –≤–Ј–∞–Є–Љ–Њ—Б–≤—П–Ј–∞–љ—Л –Љ–µ–ґ–і—Г —Б–Њ–±–Њ–є, –∞ —В–∞–Ї–ґ–µ —Е–∞—А–∞–Ї—В–µ—А–Є–Ј—Г—О—В –і–Є–љ–∞–Љ–Є—З–µ—Б–Ї–Є–µ —Б–≤–Њ–є—Б—В–≤–∞ —А–Њ–±–Њ—В–∞.
–Я—А–µ–Є–Љ—Г—Й–µ—Б—В–≤–∞ –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є—П —А–Њ–±–Њ—В–Њ–≤-–Љ–∞–љ–Є–њ—Г–ї—П—В–Њ—А–Њ–≤.
–У–ї–∞–≤–љ—Л–Љ–Є –њ–Њ–Ї–∞–Ј–∞—В–µ–ї—П–Љ–Є —А–∞–±–Њ—В—Л —А–Њ–±–Њ—В–Њ–≤ —П–≤–ї—П—О—В—Б—П —В–Њ—З–љ–Њ—Б—В—М –Є –±—Л—Б—В—А–Њ–і–µ–є—Б—В–≤–Є–µ. –Ф–∞–љ–љ—Л–µ –њ–∞—А–∞–Љ–µ—В—А—Л –≤–Ј–∞–Є–Љ–Њ—Б–≤—П–Ј–∞–љ—Л –Љ–µ–ґ–і—Г —Б–Њ–±–Њ–є, –∞ —В–∞–Ї–ґ–µ —Е–∞—А–∞–Ї—В–µ—А–Є–Ј—Г—О—В –і–Є–љ–∞–Љ–Є—З–µ—Б–Ї–Є–µ —Б–≤–Њ–є—Б—В–≤–∞ —А–Њ–±–Њ—В–∞.
–Я—А–µ–Є–Љ—Г—Й–µ—Б—В–≤–∞–Љ–Є –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є—П —А–Њ–±–Њ—В–Њ–≤-–Љ–∞–љ–Є–њ—Г–ї—П—В–Њ—А–Њ–≤ —П–≤–ї—П—О—В—Б—П:
вЧП –С—Л—Б—В—А–∞—П –Њ–Ї—Г–њ–∞–µ–Љ–Њ—Б—В—М —А–Њ–±–Њ—В–∞, –љ–µ—Б–Љ–Њ—В—А—П –љ–∞ –µ–≥–Њ –≤—Л—Б–Њ–Ї—Г—О —Б—В–Њ–Є–Љ–Њ—Б—В—М;
вЧП –Я–Њ–≤—Л—И–µ–љ–Є–µ –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В–µ–ї—М–љ–Њ—Б—В–Є —В—А—Г–і–∞;
вЧП –£–ї—Г—З—И–µ–љ–Є–µ —Н–Ї–Њ–љ–Њ–Љ–Є—З–µ—Б–Ї–Є—Е –њ–Њ–Ї–∞–Ј–∞—В–µ–ї–µ–є;
вЧП –Я–Њ–≤—Л—И–µ–љ–Є–µ —В–Њ—З–љ–Њ—Б—В–Є –≤—Л–њ–Њ–ї–љ–µ–љ–Є—П —В–µ—Е–љ–Њ–ї–Њ–≥–Є—З–µ—Б–Ї–Є—Е –Њ–њ–µ—А–∞—Ж–Є–є;
вЧП –Ш—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ –≤ –Њ–њ–∞—Б–љ—Л—Е –і–ї—П —З–µ–ї–Њ–≤–µ–Ї–∞ —Г—Б–ї–Њ–≤–Є—П—Е;
вЧП –Ш–Ј–±–∞–≤–ї–µ–љ–Є–µ —З–µ–ї–Њ–≤–µ–Ї–∞ –Њ—В –Љ–Њ–љ–Њ—В–Њ–љ–љ–Њ–є –Є —А—Г—В–Є–љ–љ–Њ–є —А–∞–±–Њ—В—Л;
вЧП –Т–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В—М –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є—П —А–Њ–±–Њ—В–∞ –≤ —В—А–Є —Б–Љ–µ–љ—Л;
вЧП –У–Є–±–Ї–Њ—Б—В—М –Є –∞–≤—В–Њ–љ–Њ–Љ–љ–Њ—Б—В—М —Б–Є—Б—В–µ–Љ—Л —Г–њ—А–∞–≤–ї–µ–љ–Є—П.
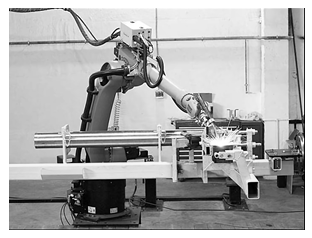
–†–Њ–±–Њ—В—Л-–Љ–∞–љ–Є–њ—Г–ї—П—В–Њ—А—Л –њ–Њ—Б—В–µ–њ–µ–љ–љ–Њ –≤–љ–µ–і—А—П—О—В—Б—П –≤ –Љ–∞—И–Є–љ–Њ—Б—В—А–Њ–Є—В–µ–ї—М–љ—Г—О –Њ—В—А–∞—Б–ї—М –Є –љ–∞ –і–∞–љ–љ—Л–є –Љ–Њ–Љ–µ–љ—В —П–≤–ї—П—О—В—Б—П –µ–µ –љ–µ–Њ—В—К–µ–Љ–ї–µ–Љ–Њ–є —З–∞—Б—В—М—О. –Э–∞ —А–Є—Б—Г–љ–Ї–µ 5 –њ–Њ–Ї–∞–Ј–∞–љ —Б–≤–∞—А–Њ—З–љ—Л–є —Ж–µ—Е, –≤ –Ї–Њ—В–Њ—А–Њ–Љ –њ—А–Є–Љ–µ–љ—П—О—В—Б—П —Б–≤–∞—А–Њ—З–љ—Л–µ —А–Њ–±–Њ—В—Л-–Љ–∞–љ–Є–њ—Г–ї—П—В–Њ—А—Л.

–†–Є—Б—Г–љ–Њ–Ї 5 вАФ –¶–µ—Е —Б–≤–∞—А–Ї–Є
–°–њ–Є—Б–Њ–Ї –ї–Є—В–µ—А–∞—В—Г—А—Л/ References
- –Т.–Ь. –Я–∞—З–µ–≤—Б–Ї–Є–є, –°.–Э. –ѓ—Ж–µ–љ–Ї–Њ, –Р.–Э. –Ю—Б–Є–љ—Ж–µ–≤ вАЬ–Ь–∞—И–Є–љ—Л –Є –Њ–±–Њ—А—Г–і–Њ–≤–∞–љ–Є–µвАЭ –£—З–µ–±.–њ–Њ—Б–Њ–±–Є–µ, вАФ –Т–Њ—А–Њ–љ–µ–ґ: –§–У–С–Ю–£ –Т–Я–Ю вАЬ–Т–Њ—А–Њ–љ–µ–ґ—Б–Ї–Є–є –≥–Њ—Б—Г–і–∞—А—Б—В–≤–µ–љ–љ—Л–є —В–µ—Е–љ–Є—З–µ—Б–Ї–Є–є —Г–љ–Є–≤–µ—А—Б–Є—В–µ—ВвАЭ, 2010 –≥. вАФ 166 —Б.
- –ѓ—Ж–µ–љ–Ї–Њ –°.–Э. –Ъ–Њ–љ—Б—В—А—Г–Ї—В–Њ—А—Б–Ї–Њ-—В–µ—Е–љ–Њ–ї–Њ–≥–Є—З–µ—Б–Ї–∞—П –њ–Њ–і–≥–Њ—В–Њ–≤–Ї–∞ –Љ–∞—И–Є–љ–Њ—Б—В—А–Њ–Є—В–µ–ї—М–љ–Њ–≥–Њ –њ—А–Њ–Є–Ј–≤–Њ–і—Б—В–≤–∞. –Ъ—Г—А—Б–Њ–≤–Њ–µ –њ—А–Њ–µ–Ї—В–Є—А–Њ–≤–∞–љ–Є–µ: —Г—З–µ–±. –њ–Њ—Б–Њ–±–Є–µ [–≠–ї–µ–Ї—В—А–Њ–љ–љ—Л–є —А–µ—Б—Г—А—Б] / –°.–Э. –ѓ—Ж–µ–љ–Ї–Њ, –°.–Ы. –Э–Њ–≤–Њ–Ї—Й–µ–љ–Њ–≤. вАФ –Т–Њ—А–Њ–љ–µ–ґ: –§–У–С–Ю–£ –Т–Ю вАЬ–Т–Њ—А–Њ–љ–µ–ґ—Б–Ї–Є–є –≥–Њ—Б—Г–і–∞—А—Б—В–≤–µ–љ–љ—Л–є —В–µ—Е–љ–Є—З–µ—Б–Ї–Є–є —Г–љ–Є–≤–µ—А—Б–Є—В–µ—ВвАЭ, 2018. 82 —Б.
- R-1000iA/80F —В–µ—Е–љ–Є—З–µ—Б–Ї–Њ–µ –Њ–њ–Є—Б–∞–љ–Є–µ –Љ–∞–љ–Є–њ—Г–ї—П—В–Њ—А–∞.
- –†–Њ–±–Њ—В—Л вАФ –Љ–∞–љ–Є–њ—Г–ї—П—В–Њ—А—Л [–≠–ї–µ–Ї—В—А–Њ–љ–љ—Л–є —А–µ—Б—Г—А—Б] https://www.fanuc.eu/ru/ru